
An Interactive Exploration of Computer Vision for Unmanned Aerial Vehicles (UAVs)
Date:
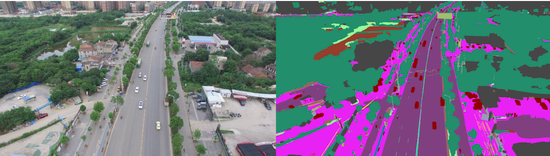
Presented work on multi-modal semantic segmentation for autonomous drone navigation at KEF Robotics. The talk covered our approach to power line detection across RGB and infrared modalities using transfer learning, domain adaptation, and cross-modal label transfer under severe data constraints.
Key Topics:
- Transfer learning with transformer-based segmentation models
- Domain adaptation from simulation to real-world imagery
- Cross-modal label transfer from RGB to infrared
- Practical challenges in deploying computer vision for UAVs
- 45% inference speed optimization techniques